APM kontrol cihazı kullanıcıları için, telemetri verilerinin üst üste bindirilmesi için özel bir cihaz geliştirilmiştir - Minim OSD. OSD kısaltması, operatörün ekranında ek bilgilerin görüntülenmesi anlamına gelen İngilizce Ekran Üstü Gösterim'den gelir.
Çinli üreticiler hem uçuş kontrol cihazlarını (HKPliot Mega, ArduFlyer) hem de OSD kontrol cihazlarını (MAVLink-OSD) üretiyor.

Harici olarak Minim OSD, MAVLink-OSD'den pek farklı değildir; ana çipin 45 derece döndürüldüğü kartın ayna kopyası gibidir. Ayrıca MAVLink-OSD'de video sinyali tipini seçmek ve dijital ve analog parçaların güç kaynağını birleştirmek için atlama telleri yoktur.
Minim OSD v1.0'da kamera gücü 12 volttan kullanıldığında aşırı ısınma sorunu yaşandı, v1.1 sürümünde bu sorun çözüldü.
HK'nin 2013 yılı sonunda teslimatta sorun yaşaması nedeniyle RCTimer'dan MAVLink-OSD siparişi verdim.

Programlama için kesinlikle bir FTDI adaptörüne ihtiyacınız olacaktır. Bu nedenle MAVLink-OSD ile birlikte FTDI Tool V1.0 adaptörünü de http://www.rctimer.com/product_684.html aldım.

Cihazı yapılandırmak ve flaşlamak için ArduCam-OSD adı verilen özel bir yazılıma ihtiyacınız olacak. En son sürümü indirin yazılım ArduCam-OSD ve ürün yazılımı burada http://code.google.com/p/arducam-osd/downloads/list bulunabilir. Açık şu an güncel sürüm 2.0.
Ayrıca alternatif ürün yazılımı da yükleyebilirsiniz, projenin adı minimosd-extra'dır. Bilgiler burada https://code.google.com/p/minimosd-extra/ bulunur. Firmware'i yüklemek için kendi yardımcı programınıza ihtiyacınız olacak - MinimOSD-Extra Config Tool. Kural olarak arşiv, yardımcı programı ve ürün yazılımını içerir. Buradan indirebilirsiniz https://code.google.com/p/minimosd-extra/downloads/list. Sürüm sayısı baş döndürücü.
Kart ve adaptör şrink filmle kaplandı.
Denetleyici, kusursuz koruması olmayan, altı pimli, çok uygunsuz bir bağlantı konektörüne sahiptir. Tüm kontaklar programlama için kullanılır, ancak uçuş kontrol cihazına bağlanmak için yalnızca 4 kontak kullanılır.
Programlama için tek yapmanız gereken bir mini USB kablosu bulmaktır.

Dört pimli konektöre gelince, her şey daha karmaşıktır. Karıştırırsanız ve yanlış bağlarsanız duman çıkabilir.
OSD, telemetri konektöründeki uçuş kontrol cihazına bağlanır. OSD'ye giden kablo merkezi kontaklara bağlanmalıdır: GND, VCC, RX, TX.
Radyo modem kullanıyorsak ona paralel bağlarız. Bu yüzden Y kablosunu lehimlemek zorunda kaldım.

Fotoğrafta, bir konektöre GPS bağlı olan AIOP kontrol cihazının kablosu gösterilmektedir.
Evrensel olsun diye OSD'min TX'ine giden kabloyu çıkarmadım, bu kabloyu bir daha nerede kullanacağımı bilemezsiniz.
Kartın analog kısmına 5 volt vermediğiniz takdirde kartın sessiz kalacağını belirtelim.

Bazı kaynaklar, kartın yeniden yapılmasını ve analog parçanın dijital olandan çalıştırılmasını öneriyor, ancak ben bunu yapmadım çünkü parazit olabileceğine dair bir görüş var.
Tek bir güç kaynağından bağlanmaya karar verenler için devre fotoğraftaki gibi olacaktır.

Şu anda analog kısmım, daha önceki yazımda da bahsettiğim bir video vericisinden güç alıyor.
ArduCAM OSD Yapılandırması
Yerel ArduCAM OSD Config yardımcı programıyla başlayalım. Şu anda güncel sürüm 2.1.2.0'dır.
Ana öğeler program menüsünün yanı sıra aşağıdaki ekranlar arasında geçiş yapan üç sekmeyi içerir: Yapılandırma, Panel 1, Panel 2.
Yapılandırma, burada her şey çok açık.
Öncelikle port numarasını seçin ve OSD'den Oku düğmesine basın.

NTSC - PAL video sinyali tipinin menü aracılığıyla değiştirilebildiğine dikkat edilmelidir. Video programları Mod. Dosya menü öğesi ayarlarınızı kaydedip yüklemenize veya varsayılan ayarlara gitmenize olanak sağlar. Seçenekler menüsünde Panel1 ve 2 için ızgara modunu etkinleştirebilir, aygıt yazılımını güncelleyebilir, bir arka plan görüntüsü seçebilir, ayarlar için günlüğü kullanabilir ve kendi yazı tiplerinizi ekleyebilirsiniz.

Panel 1, ilk ekran için videonun üstünde görüntülenen bilgileri yapılandırmak için kullanılır. Kanal değiştirme, serbest bir radyo kontrol kanalı OSD Geçiş Kanalı olarak ayarlanmıştır.

Buna göre ikinci ekran için Panel 2’yi yapılandırıyoruz.

Ürün yazılımı aynı yardımcı program kullanılarak güncellenir.

MinimOSD-Ekstra Yapılandırma Aracı
MinimOSD-Extra Config Tool programını açtığımızda klasörlerin karıştığı ve ArduCAM OSD Config'in yeniden başlatıldığı görülüyor. İlk izlenim bu aslında çok benzer ama daha çok ayar var.
Temel farklılıklara bakalım.
İlk adım model tipini seçmektir: Uçak, Helikopter.
Bir uyarı oluştuğunda ekranın otomatik olarak açılır menüde belirtilene geçmesini sağlayan bir seçenek eklendi (Uyarılar Otomatik Panel Geçişi). Bu, örneğin hiçbir şeyin görünümü etkilememesi için ikinci ekrandaki tüm bilgilerin kaldırılması durumunda gereklidir.
Pil yüzde veya mA olarak görüntülenebilir.
Ve değerlerden önce simgelerin görüntülenmesinden sorumlu olan bir blok daha Değerden önce işareti göster.

İlk ekran

İkinci ekran

sonuçlar
İlk olarak ArduCAM OSD Config üzerinden firmware'i kurdum.

Prensipte her şey yolundaydı ama aşağıda ifade edilen bir nüans konusunda endişeliydim.
Cihazı bağladıktan sonra ekranda soldaki bazı bilgilerin kesildiğini fark ettim. Parametre değerlerinin önündeki simgeler yarıya kadar eksik. Sinyal türünü PAL olarak değiştirmeyi denemeye karar verdim, ancak sonunda durum daha da kötüleşti, ekranın üst ve alt kısmı kesildi, bu yüzden tekrar NTSC olarak değiştirdim. Üçte değil, yalnızca bir tarafta olmasına izin verin, özellikle solda bu kusuru düzeltmeye çalışabileceğiniz için.

Taşınan bilgiler bir karakter sağa doğru bloke edilir.

Operasyon ağrısızdı, bunun için yeterli alan vardı.


Sonunda her şey yolunda gitti, simgeler artık tamamen görünüyor, bilgiler ekranda mükemmel bir şekilde okunabiliyor.
Ancak MinimOSD-Extra ürün yazılımı 2.4 R726 kuruldu, ancak ekranda bir tür rezalet görünmeye başladı.

Görüntü okunmaz hale geldi, bilgiler ekranın her yerine karıştı.

Daha önceki bir sürüm olan 2.2'yi indirdim.

Bu firmware sürümüyle birlikte bilgiler bozulmadan görüntülenmeye başlandı.

sonuçlar
Kompakt ve ucuz cihaz. Oldukça evrenseldir, hem orijinal ArduPilot Mega (APM) kartlarıyla hem de HKPILOT Mega, ArduFlyer klonlarıyla ve ayrıca MPNG veya MultyWii donanım yazılımına sahip AIO serisi denetleyicilerle (Hepsi Bir Arada) kullanılır. DJI Naza kontrol cihazlarına bağlanma konusunda forumlarda bilgiler var ancak bu, elinizde bir havya ile çalışmayı gerektiriyor.
Tek olumsuzluk, dört pimli konnektöre sahip bir kabloyu bağladığımız karttaki altı pimli konnektördür. Pek çok çeşidi olabilir; hata yaparsanız koruma olmadığı için tahtayı yakabilirsiniz.
Ayrıca kartın dijital ve analog kısımlarına güç vermeyi de hatırlamanız gerekir, aksi takdirde çalışmaz. Hangi beslenme yöntemini seçeceğiniz herkes için daha uygun olacaktır.
Elbette MinimOSD-Extra'yı daha çok sevdim çünkü ArduCam OSD Config'de bulunmayan ek ayarları yapmanıza olanak sağlıyor. Ancak ortaya çıktığı üzere hala kararlı bir sürüm bulmamız gerekiyor. Bazı donanım yazılımlarında video üzerinden bilgi çıkışının bozulduğu gerçeğiyle karşılaştım. Çalışan bir sürüm bulmayı başardığım ilk sefer değildi. Bu nedenle bazı MinimOSD-Extra seçenekleri benim için mevcut değildi. Ne yazık ki bu, birçok açık kaynaklı projenin dezavantajıdır.
Bu nedenle ArduCam-OSD Config'in daha stabil ve kanıtlanmış olduğunu belirtmekte fayda var.
Denetleyici, video üzerine yüksek kaliteli bilgi paylaşımı gerçekleştirir; metin oldukça net görünür ve küçük bir ekranda okunması kolaydır. Bilgilerin görüntülenmesinde herhangi bir yavaşlama fark etmedim.
Betaflight OSD (ekrandaki bilgiler), çeşitli sensörlerden gelen bilgileri uçuş kontrol cihazı aracılığıyla bir video akışına entegre eder. Tipik olarak OSD, ek olarak monte edilmiş bir kart veya uçuş kontrol cihazına zaten entegre edilmiş bir çiptir. OSD, pil voltajı, ufuk çizgisi, rakım ve çok daha fazlası gibi bilgileri kask veya gözlük ekranına iletir.
Quadcopter'in PID'sini, filtrelerini ve diğer ayarlarını değiştirmek için OSD menüsünü de kullanabilirsiniz. Bu yazımda sizlere Betaflight OSD'nin ne olduğunu, ne işe yaradığını ve nasıl kurulacağını anlatacağım.
Betaflight OSD ve MinimOSD (MWOSD)
Betaflight OSD, MinimOSD'den daha basit ve daha iyidir:
- Birincisi, uçuş kontrol cihazına zaten entegre edilmiş bir çiptir, herhangi bir şeyi lehimlemeye veya bağlamaya gerek yoktur, MinimOSD ise quadcopter'in PC, kamera, video vericisi gibi tüm bileşenlerini lehimlemeniz gereken ayrı bir karttır. vb. hangi sensörleri tekrar kullanacağınıza bağlı olarak değişir. Ayrıca bu modülü bilgisayarınız üzerinden flaşlamak için bir programlayıcıya ihtiyacınız vardır.
- Betaflight OSD'nin Faydaları: Her şey zaten entegre olduğundan kolay kurulum. Kurulum Betaflight GUI'sinde gerçekleşir. Herhangi bir şeyi lehimlemeye veya flaşlamaya gerek yoktur; bir programlayıcıya veya üçüncü taraf modül yazılımına gerek yoktur.
- Betaflight OSD, genellikle SPI BUS'a bağlı olduğundan UART bağlantı noktasını işgal etmez.
Şimdilik MinimOSD zaten oldukça iyi geliştirilmiş olmasına rağmen grafiksel bir kabuğa ve benzer özelliklere de sahip.
Hangi uçuş kontrolörleri Betaflight OSD'yi destekliyor?
Entegre OSD'ye sahip tüm uçuş kontrol cihazları Betaflight OSD'yi desteklemez; bazıları OSD'yi yapılandırmak için ek yazılım gerektirir.
Bugün Betaflight OSD şu uçaklar tarafından desteklenmektedir: Matek F405, DYS F4 Pro, Kakute F4, Omnibus F4 ve Betaflight F3.
Betaflight OSD'yi ayarlama
OSD, Betaflight donanım yazılımı V3.1 ve sonraki sürümlerde desteklendiğinden, öncelikle en son uçuş kontrol cihazı donanım yazılımına sahip olduğunuzdan emin olun.
Uçuş uçağınızda zaten entegre bir OSD çipi varsa, kamerayı ve video vericiyi uygun bağlantı noktalarına bağlamanız yeterlidir.
Aşağıda kameranın ve vericinin DYS F4 Pro FC uçuş kontrol cihazına nasıl bağlanacağına ilişkin bir örnek verilmiştir; kamera "Vin"e ve vericiyi "Vout"a bağlar:
Şimdi Betaflight Yapılandırıcıya bağlanın, şuraya gidin: Yapılandırma ve aç OSD:
Bundan sonra kurulumu başlatmak için OSD sekmesine gidin:
Bu arayüzden daha basit ne olabilir? Görüntülemek istediğiniz verileri açıp kapatmanız yeterlidir.
Video Formatı - FPV kameranızın hangi modda olduğuna bağlı olarak PAL veya NTSC'yi seçin. Kameranın hangi modda çalıştığını bilmiyorsanız, onu OTOMATİK olarak ayarlayın; programın kendisi kameranın çalışması için istenen formatı seçecektir.
Önemli bilgi: Önizleme ekranı PAL veya AUTO modundaysa ve kameranız NTSC ise ekranın alt kısmında gösterilen veriler kesilecektir, bu formatın bir özelliğidir, daha kısa çerçeveye sahiptir. AUTO formatını kullanırken ihtiyacınız olan veriyi ekranın ortasına yerleştirmek daha iyidir.
“Alarm” bloğunda RSSI değerlerini, pil kapasitesini, uçuş öncesi süreyi (kronometre) ve rakımı yapılandırabilirsiniz. Veriler bu rakamlarla eşleşmeye başlar başlamaz kaskın veya gözlüğün ekranında yanıp sönmeye başlayacaklar.
Önizleme penceresinde görüntülenen verileri istediğiniz gibi sürükleyebilirsiniz ancak kesilebileceği için kenarlara çok yakın koymayın.
- Akü voltajı göstergesi
- Uçuş süresi (kronometre)
- Ad (kendi))
- Gaz değerleri
- Bir drone ne kadar akım tüketir?
- Ne kadar mAh pil kapasitesi tüketiliyor?
OSD menüsünü gözlük veya kaskla etkinleştirmek için uzaktan kumandadaki çubuklarla yapılan hareketlerin bir kombinasyonuna ihtiyacınız vardır:
- merkezdeki gaz
- yalpalama (sapma, eksen burulması) sola
- ileri adım (eğim, eğim)
Ayarlama sırasında gaz her zaman ortada olmalıdır!
Menüde gezinmek için şunu kullanın: doğru Çubuk uzaktan kumandada. Kaydırmak için yukarıya veya aşağıya yapıştırın, bir menü öğesini seçmek için sola/sağa yapıştırın.
Burada PID'leri, filtreleri, profilleri vb. değiştirebilirsiniz. Betaflight'ta OSD sekmesi GUI'si aracılığıyla zaten ayar yaptıysanız, bu ayarların çoğu açıklayıcı niteliktedir. Ancak burada hala tüm öğeler yok; bazıları yalnızca yapılandırıcının kendisinde mevcut. Ayarları yaptıktan sonra ana menüye gidin ve " Kaydet*Yeniden başlat«.
Betaflight OSD'de yazı tipi nasıl değiştirilir?
Ekranda gösterilen yazı tipini beğenmezseniz Betaflight Yapılandırıcıda kolayca değiştirebilirsiniz, bunun için OSD sekmesine gidin ve altta Yazı Tipi Yöneticisi düğmesi bulunacaktır:
Yeni bir yazı tipi seçtikten sonra, varsayılan yazı tipi önizleme penceresinde gösterilmeye devam edecektir, ancak seçtiğiniz yazı tipi gözlüğünüzde ve kaskınızda olacaktır, bu nedenle endişelenmeyin.
SSS
Kaskımda OSD'den gelen verileri neden göremiyorum?
Doğru video formatını (PAL veya NTSC) belirtip belirtmediğinizi kontrol edin ve bunları değiştirmeyi deneyin. Hala çalışmıyorsa kamera ve vericiden OSD modülüne giden kabloları ve lehim bağlantılarını kontrol edin.
Adımı nasıl değiştirebilirim?
Betaflight, Konfigürasyon sekmesinde aşağı kaydırın, “Craft name” metin alanı olacaktır, oraya başka bir isim girebilirsiniz.
Bu yazıda MinimOSD'yi bağlamaya, ürün yazılımına ve yapılandırmaya bakacağız. Ayrıca bir şeyler ters giderse ne yapılması gerektiği ve her şeyin üzücü bir şekilde bitmemesi için ne yapılması gerektiği sorularına da cevap vereceğiz.
« Petka - cihazlar!?!? -Üç yüz!!! -Ne üç yüz??? "Peki ya cihazlar?"
MinimOSD. Ucuz ve çok kullanışlı bir eşarp. Helikopterde şu anda neler olduğunu görmenizi sağlar - mevcut voltaj, kaç amper kullanıldığı, kaç tane küresel konumlandırma uydusunun yakalandığı ve ayrıca gökyüzünde "kaybolmanızı" önler. Gökyüzünde kaybolmak imkansız mı diyorsun? Ama bu oldukça mümkün. Temel "Kalkışladım, ah, ama her şey yukarıdan farklı... ah, neredeyim?" den başlayarak, örneğin karanlıkta veya yağışta uçmak veya kazara bir bulutun içine uçmak gibi zorlu uçuş koşullarına kadar. aşağıdaki videodaki gibi:
Dördüncü dakikada yalnızca hayat kurtaran “ev” oku nereye uçulacağını gösteriyordu.
Tamam, tamam, bu kadar şarkı sözü yeter, haydi pratik yapalım!
HAZIRLIK.
Yani MinimOSD'yi sipariş ettiniz. Bangood'da, Hobbyking'de veya RCTimer'da - nerede olduğu önemli değil ve şöyle bir şey elde ettik:
Ellerim onu iş istasyonuna bağlayıp ne gösterdiğini görmek için can atıyor. Ancak bunu hemen yapmanıza gerek yok! Yeni bir OSD sipariş etmekle doludur - ve bu zaman kaybıdır (ki asıl mesele budur) ve elbette para kaybıdır.
Kartta iki büyük çip var: ATMEGA328P ve MAX7456. İlk çip (daha doğrusu mikrodenetleyici), uçuş kontrolörü (tahtanın "dijital kısmı") ile iletişimden sorumludur. İkincisi ise Maxim'in tek kanallı monokrom OSD'sidir (Ekran Görüntüsü - ekrandaki menü), buna kartın "analog kısmı" diyelim. Yani bu MAX7456 oldukça kaprisli bir çip. Aşırı ısınmayı sevmez, “dijital” zemin ile “analog” zemin arasındaki ani sıçramaları sevmez, kısacası kolay yanar. Ve şans eseri, tembel Çinliler ASLA mikro devrenin standart ısı emicisini (“göbekte”) lehimlemezler. Eşarpı geldiği gibi kullanırsanız MAX yanacaktır - %80 garanti. Bunun olmasını önlemek için aşağıdaki fotoğrafta işaretlenen üç deliği lehimleyin.

Bunu yapmak için, deliğe ince lehim (1 mm çapında, tercihen akı ile) yerleştirin ve bir havya ile ısıtın:

Ve sonuç şu (lehimleme pek iyi değil, ama elimden geldiğince daha iyisini yapacaksınız!)

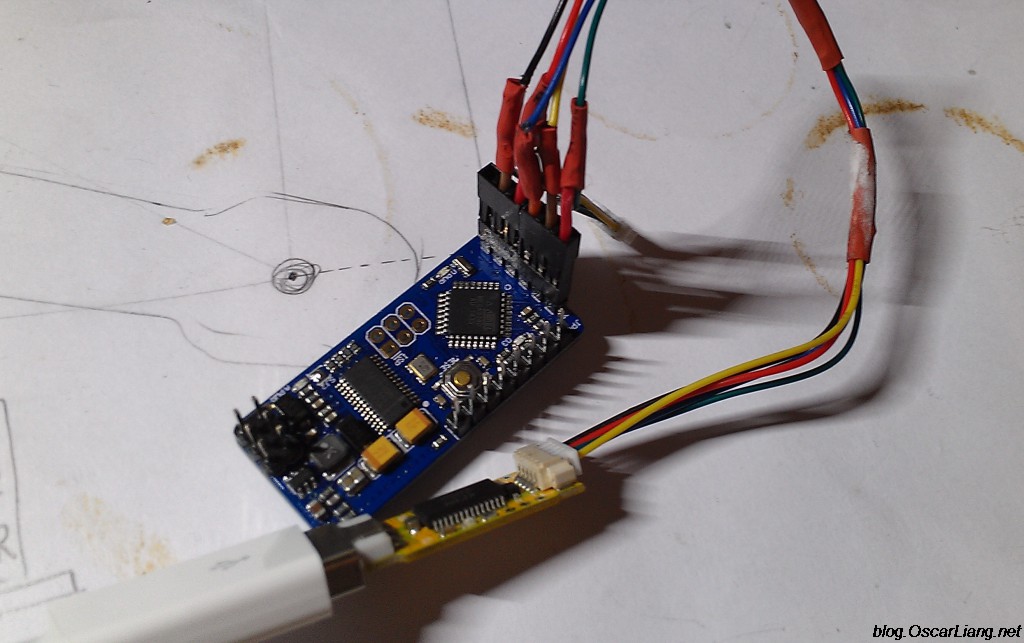
Şimdi bağlantı özellikleri hakkında. Dikkatli olanlar jumper'ı üstüne lehimlediğimi fark etti. MinimOSD'yi bağlamanın birkaç yolu vardır ve birçok kopya bozuktur; bu daha iyi, daha doğru veya daha az parazite neden olur. Dijital ve analog toprakları birleştiren ve “dijital” kısımdan 5 volt ile beslenen bir bağlantı yöntemi kullanıyorum. MinimOSD oldukça fazla enerji tükettiği için anakartı ayrı bir güç kaynağından beslemek daha iyidir. Neredeyse şuna benziyor:

Yani tepeye bir jumper lehimledim, böylece toprakları birleştirdim. Ayrıca tahtanın "ön" tarafına bir atlama teli eklemeniz gerekir.

BAĞLANTI VE KURULUM
Her şey lehimlendi, artık atkımız bilgisayara bağlanmaya hazır. Bunu yapmak için bir FTDI adaptörüne (örneğin veya başka bir USB-UART TTL adaptörüne) ihtiyacımız var.

5 kablo kullanarak bağlanıyoruz, bağlantı şeması şu şekildedir: 1. GRN, 2. Tx, 3. Rx, 4. +5V, 5. GND (OSD tarafından) - bunları FTDI adaptörüne bağlayın 1. DTR, 2. Rxi, 3 .Txo, 4.VCC, 5.GND. İşte benim için nasıl bağlandığına dair bir fotoğraf:

Anlaşılmadıysa bu videoyu özellikle 1:03'teki dikkatlice izleyin
Şimdi ne indirileceği ve nasıl yapılandırılacağı. Başlangıç olarak, helikopterler ve uçaklar için ürün yazılımının farklı olduğunu söyleyeceğim. Ayrıca Multivia (kvTeam) için ürün yazılımı da vardır ve bağımsız çalışmadan (uçuş kontrolörü olmadan) Naza'ya bile bağlanmaya kadar ayrı modlar da vardır.
Ancak burada "klasik" durumu ele alıyoruz - otomatik bir iş istasyonu denetleyicisindeki bir helikopter. resmi proje sayfası. indirme sayfası (otomatik bir iş istasyonundaki helikopter için ExtraCopter'ı indirmeniz gerekir). Ancak bunlar eski versiyonlar, insanlar o zamandan beri oldukça fazla değişiklik yaptı. Modern ürün yazılımı burada bulunur. Yazma sırasında bu, Ya.Disk'te bulunan (MinimOSD_Extra kullanıcısı, Top_Secret şifresi) R800 ürün yazılımıdır.
Arşiv, ürün yazılımının kendisini (HEX dosyası), yazı tiplerini içeren bir dosyayı (mcm dosyası) ve programın kendisini (OSD_Config.exe) içerir.
Öncelikle cihaz yöneticisine gidelim ve FTDI portunun hızını kontrol edelim (115200 olarak ayarlayalım):

OSD_Config.exe programını başlatıyoruz, bağlantı noktasını seçiyoruz, “OSD'den Oku” düğmesine basıyoruz, başarılı okumayla ilgili bir mesaj görünmelidir. Fabrikadan ne tür bir firmware yüklendiği bilinmediğinden gelecekte sorun yaşamamak adına yeni bir firmware yükleyeceğiz. Bunu yapmak için Seçenekler>Firmware'i Güncelle menüsüne tıklayın.

dosyayı seçin ve yükleyin.
Başarılı ürün yazılımı hakkında bir mesaj alacağız

Daha sonra kontrol cihazı başlatılacak ve raporlanacak olan ayarları programa yükleyecektir.

Firmware'e karşılık gelen yazı tiplerini içeren bir dosyayı indirmenin zamanı geldi (bu yapılmazsa, OSD'nin görünümü çok komik veya tamamen okunamaz hale gelebilir). Seçenek>Karakter Kümesini Güncelle menüsüne tıklayın,

MCM dosyasını seçin ve yükleyin

Hazırlanmayı bekliyoruz

Doldurduktan sonra kontrolör yeniden başlatılır.



Biraz açıklayayım:
RSSI kanalı — RSSI'nin yüzdelere dönüştürülmesi. 5 volt 255'tir (sekizli sistemde maksimum). Ve FRsky alıcısının maksimum sinyali 3,3 volttur. RSSI RAW'ı etkinleştir kutusunu işaretlerseniz, FPV ekranında "ham" verileri göreceğiz. Bunlar ayarlara koyabileceklerimiz. Veya sadece değerlerimi girebilirsiniz.
Başka bir incelik - OSD ekranlarını değiştirme. Fark edeceğiniz gibi veriler için iki panel var. Üç görüntüleme seçeneğine geçiş yapabiliriz: ekran1 (Panel1), ekran2 (Panel2), veri içermeyen boş ekran (Devre Dışı). Bunun için öncelikle ekranlar arasında tam olarak nasıl geçiş yapacağımıza karar vermemiz gerekiyor. Örneğin, bir düğme veya üç konumlu bir geçiş anahtarı kullanarak ekranlar arasında geçiş yaparsak kanala göre üç değer aralığına sahip oluruz (Panel1: 0-1233, Panel2: 1233-1467, Devre Dışı: 1467-) 1701). Bu durumda Döndürme Anahtarlama butonu kapatılmalıdır. Ve iki konumlu basit bir geçiş anahtarıyla geçiş yaparsak, Döndürme Değiştirmeyi etkinleştirmek mantıklı olur. Aynı zamanda geçiş anahtarı açıldığında ekranları tek tek değiştireceğiz (Panel1 -> Panel2 -> Devre Dışı -> Panel1 ......), geçiş anahtarı kapatılır kapatılmaz geçiş yapılacak ekranlar arasında duracaktır. Hangi kanalın ekran değiştireceği OSD Kanalı Değiştir başlıklı açılır listeden belirlenir. Buna 6 numaralı kanalı koydum ve ilk başta bazılarının (benim de dahil) kafasını karıştıran başka bir tuzak daha var - Uyarı Otomatik Panel Anahtarı. Bu liste, önceden tanımlanan uyarılardan herhangi birinin meydana gelmesi durumunda hangi ekrana geçileceğini belirler. Görünüşe göre her şey açık. Uçuyorsunuz, uçuş sırasında bir şey oldu, OSD sizin ayarladığınız ekrana geçti. Ama işte bir soru var - ekranlar arasında geçiş yapmamızı istedik, kural olarak bu evde kurulu, helikopter uçmuyor, kontrol etmek istiyoruz - ekranlar değişmiyor! Ancak kural olarak evde GPS Fix olmadığı için - kısacası uyarı çaldı! Yani ekranlar arasında geçiş yapmak işe yaramıyor... :)
Geriye kalan parametrelerin açıklamaya ihtiyacı var mı bilmiyorum, belki daha sonra yazıya eklerim.
Sadece ana ekranı ayarlarken her şeyi bir anda oraya itmemeniz gerektiğini söyleyeceğim. Önce her şeyi kapatmak (soldaki sütunda) ve ardından yalnızca ihtiyacınız olanı açmak ve hemen ekranın sağ kısmına yerleştirmek daha iyidir. Ekranın kenarlarında boş alan bırakmanızı öneririm; monitör veya DVR tarafından yazı kalemi veya gözlükle kesilebilir.
Sonra bir tane daha önemli nokta — Mission Planner'da OSD'yi ayarlama. Diyelim ki her şeyi olması gerektiği gibi bağladınız, ancak komik sayılar ve tutum göstergesi yerine sıkıcı "Mavlink Verisi Yok" yazısını görüyoruz. Bu, OSD'nin çalıştığı, size bir şey göstermekten mutluluk duyacağı, ancak veri almadığı anlamına gelir. Yani Rx pini iş istasyonundan herhangi bir veri almaz. Birinci makul sebep— bağlarken kablolar karışmış. OSD'deki Rx'in iş istasyonundaki Tx bağlantı noktasına bağlı olup olmadığını kontrol edin. İkinci olası neden, denetleyicinin kendisinin COM bağlantı noktasına veri gönderecek şekilde yapılandırılmamış olmasıdır. Bunu yapmak için basit bir durumda İLK KURULUM > İsteğe Bağlı Donanım > OSD sekmesinde Telemetriyi Etkinleştir düğmesine tıklamanız gerekir. Bu durumda MP, OSD'ye veri göndermenize olanak tanıyan bir dizi parametreyi otomatik olarak yapılandırır. Bu sihirli düğme yardımcı olmazsa, her şeyi manuel olarak yapılandırmanız gerekir. Bunu yapmak için YAPILANDIRMA/AYAR > Tam Parametre Listesi sekmesine gidin, S harfine kadar aşağı kaydırın ve parametre değerlerini kontrol edin (veya düzeltin):
- SR0_EXT_STAT = 2
- SR0_EKSTRA1 = 5
- SR0_EKSTRA2 = 2
- SR0_EXTRA3 = 3
- SR0_POZİSYON = 2
- SR0_RAW_SENS = 2
- SR0_RC_CHANN = 5
Veriler hala akmıyorsa ve hala "Mavlink Verisi Yok" üzücü mesajını görüyorsak, OSD'nin doğru bağlantı noktasına bağlı olup olmadığını kontrol etmemiz gerekir (makale UART0 hakkında konuşuyor), belki SR1 parametreleri faydalı olabilir size (yukarıda açıklananla aynı, yalnızca UART1 bağlantı noktası için). OSD'nizin telemetri modemiyle birlikte çalışmaması da mümkündür - bu durumda, OSD'deki Tx kablosunu bağlamanız veya tam tersine çıkarmanız gerekebilir. USB kablosu bilgisayara bağlandığında OSD'nin çalışmaması gibi bir aksaklık da mevcut. Ya da belki sadece kabloları karıştırdın...
Bir fotoğraf daha paylaşacağım. Kontrol cihazımda ana telemetri bağlantı noktası bir çökme nedeniyle çalışmayı durdurdu, onu UART0'a lehimledim. Ve sonra bu bağlantı hoşuma gitti.

Burada onu doğrudan kontrol cihazından çalıştırdım. Ancak kontrolörün kendisine 5 volttan ne kaldığını kontrol etmeniz GEREKİR. Benim durumumda, denetleyicinin kendisi alıcıdan güç alıyor ve 5 volttan biraz daha yüksek bir değere ayarlanmış, böylece alıcı ve minimOSD hesaba katıldığında APM'nin kendisi için kesinlikle 5 volt oluyor.
Bir noktaya daha değinmemiz gerekiyor. OSD'yi hatalı şekilde yanıp sönerseniz " önyükleyiciyle konuşamadım" Bu hata, kelimenin tam anlamıyla "önyükleyiciyle konuşurken hata" anlamına gelir. Kabloların karışması durumunda veya yükleyicinin çıkması durumunda meydana gelebilir. Kablolar söz konusu olduğunda her şey açıksa (yukarıya doğru şekilde nasıl bağlanılacağına bakın), o zaman önyükleyici durumunda, mikro denetleyiciyi geri yüklemek için bir prosedür gereklidir.
Bootloader'ı geri yükleme.
Bunun için en azından bir programcıya ihtiyacımız var. USBasp kullanmak daha uygundur.

belki bu adaptörü beğeneceksiniz (ISP10<>ISP6)
 veya bu kablo (mevcut)
veya bu kablo (mevcut)

Genel olarak öyle ya da böyle ATMega328P'ye bir programcı kullanarak bağlanıyoruz.
OSD kartındaki ISP konektörünün pin çıkışı genel kabul görmüş olana karşılık gelir. Genellikle ilk temas karedir. Değilse, Vcc ve GND'yi takip ederek emin olmak daha iyidir.

Pinler genellikle programlayıcıda imzalanır, değilse genellikle şöyle görünür:

Bunu yapmak için önce programcının türünü seçin

Daha sonra pano tipini seçin

Ve mikrodenetleyici tipi


ve önyükleyicinin yüklenmesi için bir dakika kadar bekleyin (alttaki yeşil durum çubuğuna bakın)
 Başarılı önyükleyicinin yanıp söndüğünü belirten bir mesaj görünene kadar
Başarılı önyükleyicinin yanıp söndüğünü belirten bir mesaj görünene kadar

(Aşağıdaki hatalara dikkat etmeyin, programlayıcının donanım yazılımını güncellemeniz gerekmektedir)
Daha sonra OSD_Config.exe'ye gidin, ürün yazılımını ve yazı tiplerini daha önce açıklandığı gibi yükleyin. Ürün yazılımını iki kez yüklemeniz gerekebilir (önyükleyiciyi yükledikten sonra denetleyiciyi düzgün şekilde başlatmak için fazladan bir süre gerekir).
Eh, hepsi bu kadar gibi görünüyor. Bilmeyen varsa dahası da var. Burada net olmayan bir şey varsa, oradan “canlı” olarak izleyebilirsiniz.
Helikopterinize OSD kurulumunda iyi şanslar!
Her zaman senin, Ganiev Timur - 5yoda5.
5yoda5#apmcopter
Güncelleme 11/11/2015:“Eh, her şey lehimlendi, artık atkımız bilgisayara bağlanmaya hazır. Bunun için bir FTDI adaptörüne ihtiyacımız var (örneğin, bir RCTimer'da veya başka bir USB-UART TTL adaptöründe).
Güncelleme 11/03/2016: ISP pin çıkışının görüntüleri eklendi.
Sayfada bir hata bulursanız, tıklayın. Üst Karakter + Enter veya bize bildirmek için.
Bu kılavuzda her iki versiyona da bakacağız: normal ve Mikro, MW-OSD donanım yazılımının nasıl yapılandırılıp kullanılacağının yanı sıra Naze32'ye ve alıcıya nasıl bağlanacağımızı da bulacağız.
MinimOSD ve Mikro MinimOSD Nedir?
Kurulumu Süper Basit OSD veya E-OSD gibi taktığınız ve hemen çalışan diğer OSD'lerden çok daha karmaşık olmasına rağmen MinimOSD'nin birçok avantajı vardır ve ekranın görünümü tamamen özelleştirilebilir.
En kullanışlı özellikler: GPS koordinatlarının, özelleştirilebilir stillerin ve yazı tiplerinin görüntülenmesi, ekrandaki menüyü kullanarak PID kontrol cihazı katsayılarını, oranlarını vb. değiştirebilirsiniz. Ekranda nelerin görüntülenebileceğine dair bir örnek.
Menü aracılığıyla PID katsayılarının ayarlanması:

Boyutlar, ağırlık, pin çıkışı, boyutları küçültmek için lehimleme
MinimOSD'nin tam boyutlu versiyonu
Bu OSD uzun yıllardan beri var. Bu sürümün (KV Modlu MinimOSD) avantajı, yan tarafta bir akım sensörü, RSSI, voltaj sensörü vb. bağlamak için kontakların bulunmasıdır. Daha önce telleri doğrudan çipin bacaklarına çok dikkatli bir şekilde lehimlememiz gerekiyordu ve bu çok zordu. Bu sürüm hayatı çok kolaylaştırdı. Kendime böyle bir tahta satın aldım (versiyon 2)

KV Mod V2'li MinimOSD'nin boyutları: genişlik 21 mm, uzunluk: 43 mm, ağırlık: 5,5 g (konektörler dahil).
Mikro MinimOSD
Tam boyutlu sürümün tüm özelliklerine sahip olan bu OSD'nin mikro boyutuna hayran kaldım. 12V'tan güç kaynağı imkanına ek olarak eski versiyon Anakartın aşırı ısınması nedeniyle neredeyse hiç kullanılmadı. Dolayısıyla bu işlevselliği kaldırıp boyutu küçültmek çok mantıklıydı.

Mikro versiyonun ağırlığı ve boyutu yaklaşık olarak tam boyutun 1/3'üdür.
Lehimleme konnektörleri
Başlıkları tam boyutlu MinimOSD'ye lehimlemek kolay ve basitti, ancak mikro versiyona gelince, insanların genellikle bunları lehimleme şeklini sevmiyorum

Yaratıcılığım: Helikopterin içine kurulum yaparken ekstra boş alana sahip olmak için düz konektörler yerine açılı konektörler kullanmam gerekiyor.
En sonunda lehimlemeyi ve telleri korumak için ısıyla büzüşen bir paketle paketliyoruz.
Naze32'ye, bataryaya, alıcıya, kameraya, video vericiye bağlanın
Helikopterimin montajı çok basittir. Şemada bağlanması gereken her şey var: Naze32, LiPo, alıcı, FPV kamera ve video verici.

Naze32, kamera, alıcı, video verici, pil ile normal bir MinimOSD'nin bağlantı şeması.
Mikro versiyon nasıl bağlanır:

Sıkça sorulan soru 1. Bazı kişiler gaz kelebeği artırıldığında yazının kaybolduğundan şikayetçi. Çözüm: Tüm elektronikleri (kamera, OSD, video vericisi) ortak bir zemine bağlayın.
Sıkça sorulan soru 2. OSD görüntülenmiyor, yalnızca kameradan gelen resim görüntüleniyor. Çözüm: OSD ayarlarında PAL/NTSC standardını değiştirmeyi deneyin.
VBAT1 pini voltajı belirtmek için ana lityum pile bağlanır. Sinyal gücünü görüntülemek için RSSI pini kontrol alıcısına bağlanır (alıcının CPPM modunda FrSky D4R-II olması durumunda, Pin1 PPM sinyalidir, PIN2 ise RSSI çıkışıdır).
Naze32'ye seri port (TX ve RX) aracılığıyla bağlanmak, Naze32'nin uçuş verilerini (GPS, pusula yönü vb.) ekrana iletmesine olanak tanıyacak ve OSD, uzaktan kumandayı kullanarak uçuş kontrol cihazının PID katsayılarını değiştirebilecektir. .
Dikkat olmak! Bilgisayara bağlantı aynı seri bağlantı noktasını kullanır; bu, Baseflight veya Cleanflight yapılandırıcıyı kullanmak istiyorsanız öncelikle OSD'den TX ve RX'i devre dışı bırakmanız gerektiği anlamına gelir.
MinimOSD, seri bağlantı noktasına bağlanmadan bağımsız olarak RSSI ve voltajı görüntüleyerek çalışacaktır.
Taranis'i PPM modunda kullanıyorsanız şu makaleyi okuyun: RSSI'yi ayrı bir kanaldan (ek kablolar olmadan) nasıl edinebilirim, İngilizce.
Mini dörtlümün içi böyle görünüyor.
MW-OSD GUI kullanarak yapılandırma
MinimOSD için epeyce yazılım var, benim favorim Multiwii-OSD (mwosd). Mevcut sürüm 1.3'tür, yapılandırıcısı çok kullanışlı bir programdır. OSD menüsü anlaşılır, cihaz yazılımı güncel ve Cleanflight ve Baseflight desteği mevcut. Ayrıca PID katsayılarını doğrudan OSD menüsünden ayarlamanıza da olanak tanır.
MinimOSD'yi FTDI programlayıcıya bağlayın
Hem yapılandırma hem de ürün yazılımı için bir FTDI adaptörü gereklidir. Bağlantı 5 kablo üzerinden yapılır: DTR (GRN), TX, RX, 5V ve GND.


MW-OSD GUI kullanarak MinimOSD'yi yapılandırma
Grafiksel arayüz aracılığıyla herhangi bir uçuş verisinin görüntülenmesini yapılandırabilirsiniz. Çünkü Bir minikopter uçuruyorum, tek ihtiyacım olan akü voltajı, RSSI ve bir zamanlayıcı. 4S lityum pil kullanıyorum ve düşük şarj uyarısı 13,6V'a ayarlı (hücre başına 3,4V, ancak eşiği daha yükseğe ayarlamam gerekiyor). 3S konfigürasyonu için uyarının görüntüleneceği voltaj 11V olarak ayarlanabilir. FPV'yi PAL formatında kullanıyorum

Endişelenmeniz gereken tek şey akü voltajıdır. Varsayılan değer ideal olmaktan uzak olduğundan doğru değeri elde etmek için ayarlarla oynamanız gerekir. Nasıl yaparım:
"için varsayılan değer" voltaj ayarı" = 200, ve OSD tarafından gösterilen voltaj 21,0V idi. Bir multimetre aldım, aküdeki voltajı ölçtüm ve 11,1V elde ettim (multimetre yerine bunun gibi voltmetreli bir siren kullanabilirsiniz, yaklaşık trans.)

Şimdi değeri azaltalım" voltaj ayarı“110'a kadar, artık OSD ekranım 11,5V gösteriyor. Parametrenin sürekli ileri geri değişmesini önlemek için matematik ve elimizdeki bilgileri kullanarak kesin değeri hesaplamalıyız 🙂 “Voltaj ayarı” parametresinin kaç volt 1 değerinin verdiğini hesaplamalıyız.
(21.0-11.5)/(200-110) = 9.5/90 = 0.1056
Ekrandaki doğru değerin 11.1V olması gerektiğini biliyoruz yani değer " voltaj ayarı"olmalı:
110 - (11,5-11,1)/0,1056 = 106,21 (106 iyidir)
Anlam " voltaj ayarı" yalnızca yapılandırıcıda değil aynı zamanda ekrandaki menüden de değiştirilebilir, dolayısıyla MinimOSD'yi bilgisayara bağlamaya ve yapılandırıcıyı kullanmaya gerek yoktur.
MinimOSD için programcı olarak Arduino?
Daha önce diğer cihazlar için yaptığım gibi Arduino UNO'mu FTDI programcısı olarak kullanmaya çalıştım. OSD parametrelerini MW-OSD GUI programı aracılığıyla değiştirebildim. Ancak MinimOSD'yi yüklerken bir sorunla karşılaştım, hata mesajı şuydu:
Avrdude: stk500_getsync (): senkronize edilmiyor: resp = 0x00.
Veri senkronizasyonunda bir sorun var gibi görünüyor, ancak DTR'yi Arduino kartındaki RESET'e doğru şekilde bağladığımdan emin oldum, başka ne yapabileceğimi bilmiyorum, bu yüzden MinimOSD'yi flaşlamak için FTDI programlayıcımı kullandım.
OSD Menüsü: PID'leri, Hızı, voltajı, RSSI'yi yapılandırma
OSD Menüsü benim en sevdiğim özelliktir ve SuperSimple OSD'yi terk etmemin temel nedeni budur. Bilgisayara bağlanmadan değiştirebileceğiniz birçok parametre vardır. Örneğin PID katsayılarının değerlerini Bluetooth veya bilgisayar olmadan, uzaktan kumandamı kullanarak doğrudan sahada değiştirebiliyorum! Ancak, yuvarlanma hızı ve eğim hızı parametrelerini Cleanflight'ta ayrı ayrı değiştiremezsiniz; bunlar bağlantılı olduğu anda (her ikisini de yalnızca aynı anda değiştirebilirsiniz, yaklaşık çeviri.) Yeni sürüm bu parametreler bağımsız olacaktır.
MW-OSD menüsüne ulaşmak için önce helikopteri devre dışı bırakmanız, ardından:
- ortadaki gaz
- yaw (yaw) - sağa
- adım - ileri.
Menüde gezinmek için:
- Roll/pitch (pitch/roll) - menüde gezinmek için
- Yaw (sapma) - değerleri değiştirmek için
- PID Yapılandırması (Farklı uçuş modları için Dönme/Yükselme/Yaw PID'si)
- RC Ayarlama (RC Hızı, RC Expo, Pitch/Roll Hızı, Yaw Hızı, TPA (Gaz Kelebeği PID Att)
- Gerilim (gerilim gösterilsin veya gösterilmesin, “Voltajı Ayarla”, “Gerilim alarmı”, “Hücreler” değerleri)
- RSSI (göster ya da gösterme)
- Akım (akım tüketimini gösterip göstermemek, yapılandırın)
- Gelişmiş (birimler: metre/inç, sinyal: Pal veya NTSC, pusula)
- Ekran (anahtarlar, gaz kelebeği, GPS koordinatları, sensörler, gimbal vb.)
- İstatistikler (mesafe, maksimum yükseklik, maksimum hız, uçuş süresi)
yanıp sönüyor
Bazı MinimOSD satıcıları en son sürümü kendileri flashlayacak, dolayısıyla flashlama konusunda endişelenmenize gerek kalmayacak. Ancak belki daha sonra aygıt yazılımını güncellemek veya başka bir tane denemek isteyebilirsiniz. Aygıt yazılımı sürümünü kontrol etmek için helikopterin OSD'sini açın ve önyükleme ekranındaki mesaja bakın.
Her ürün yazılımı için talimatlar, yazılımın nasıl flaş edileceğini ayrıntılı olarak açıklamaktadır. Özet şu:
- Ürün yazılımı dosyalarını indirin.
- Arduino IDE'yi indirin
- Firmware dosyalarını Arduino IDE'de açın
- Gerekirse ayarları değiştirin
- Çok fazla değişiklik yapmadım, yalnızca kart tipini (WitespyV1.1) ve uçuş kontrol cihazı donanım yazılımını (Cleanflight)

- FTDI adaptörünü (programlayıcı) MinimOSD / Micro MinimOSD'ye bağlayın
- Derle ve Yükle'ye tıklayın
OSD, kamera uçuşları için yararlı bir yardımcıdır. Bu makalede OSD'nin ne olduğuna, FPV ekipmanımıza nasıl bağlandığına ve son olarak farklı OSD'lerin yeteneklerine genel bir bakışa bakacağız.
Sorularınız varsa yorumlarda bana bildirin.
OSD nedir ve avantajları nelerdir?
OSD, Ekran Üstü Gösterim anlamına gelir; Ekranda görüntü veya ekrandaki menü (yani, çoğunlukla metin olmak üzere bazı ek bilgiler, genellikle kameradan ana resmin üstünde görüntülenir). Bizim hobimizde OSD, kameranızdan gelen görüntü üzerinde uçuş parametrelerini görüntüleyen küçük bir devre kartıdır. Bu, kamerayı kullanarak uçarken quadcopterin durumunu doğrudan izlemenize olanak tanır.
Uygun sensörlere ve OSD'ye sahipseniz, pil voltajı, motorların ve diğer elektroniklerin ne kadar akım çektiği, rakımınız, GPS koordinatları vb. gibi uçuş verilerini doğrudan video gözlüklerinde veya monitörde görebilirsiniz.
Bu, kamera uçuşunu daha güvenli hale getirir çünkü pil seviyesini görebilir, ne zaman ineceğinizi, ne kadar uzağa uçtuğunuzu ve hangi yöne döneceğinizi bilebilirsiniz.
Kamera uçuşu için OSD gerekli değildir ancak gördüğünüz gibi son derece kullanışlıdır. Çoğu kişi, pildeki voltajı görmek için en azından bir SimpleOSD satın alır; bu, aşırı deşarjı önlemek için gereklidir (uzaklara uçarsanız, düşük pil sirenini duymazsınız).
OSD kullanılarak görüntülenebilen veri türleri
Resim, kameranın etrafında uçarken en sık kullanılan veri setini göstermektedir.

Zamanlayıcı
Sahip olduğunuz OSD türüne bağlı olarak bu, uçuş süresi (quadcopter'in havalandığı andan itibaren sayılır) veya çalışma süresi (quadcopter'in açıldığı andan itibaren) olabilir. Bazı OSD'ler birden fazla zamanlayıcı türünü görüntülemenize olanak tanır.
Batarya voltajı
Hemen hemen tüm OSD'ler voltajı görüntülemenize izin verir. Bu, odanın etrafında uçarken en önemli bilgidir, böylece ne zaman ineceğinizi bilirsiniz (Genellikle voltaj hücre başına 3,5V'a düştüğünde inerim)
Anlık tüketim
Akım sensörünüz varsa motorların ne kadar akım tükettiğini ve pilinizin ne kadar mAh kullanıldığını takip edebilirsiniz.
RSSI
RSSI, vericinizin sinyal gücünün bir göstergesidir ve genellikle yüzde olarak gösterilir. Ne kadar uzağa uçarsanız sinyal o kadar zayıf olur, bu bilgi hangi noktada geri dönmeniz gerektiğini bilmenize yardımcı olacaktır.
RSSI, kontrol alıcınızdan gelen, genellikle PWM formatındaki çıkıştır, bu nedenle bir D/A dönüştürücü ve alçak geçiş filtresi gerekebilir.
Uyarılar
Bazı OSD farklı alarmlar, uyarılar gösterebilir; bunun için kullanıcı olarak pil voltajı, RSSI değeri vb. gibi eşik parametrelerini ayarlamanız gerekir.
Uçak modu
Uçağınızın mevcut uçuş modunu gösterir. Bu bilgiler arasında sık sık geçiş yapıyorsanız faydalı olacaktır. farklı modlar Loiter (yerinde asılı kalma), manuel mod, otomatik tesviye modu gibi, böylece helikopterin o anda hangi modda olduğuna dair bir sorunuz olmayacak. Bunu yapmak için uçuş kontrol cihazını OSD'ye bağlamanız gerekecektir.
Küresel Konumlama Sistemi
GPS kullanarak yalnızca dronun koordinatlarını değil aynı zamanda yüksekliğini de alırsınız (ancak barometre veya sonar kullanmaktan daha doğru olacaktır). Akıllı hesaplamalar sayesinde yere göre hızı, başlangıç noktasına olan mesafeyi ve koordinatlarını görebiliriz (başlangıç noktasına doğru yönü grafiksel olarak göstermek çok yararlı bir şeydir, özellikle de biraz kaybolduysanız).
Ufuk
Sanal ufuk, dronun uzayda nasıl eğildiğini anlamanıza yardımcı olacaktır.
OSD'yi kameraya, video vericisine ve uçuş kumandasına bağlama
Tüm OSD'leri 3 türe ayırırdım:
- Bağımsız OSD
- Uçuş kontrolörüne bağlı OSD
- Hibrit
Bağımsız OSD'ler yalnızca kameraya ve video vericisine bağlanır ve uçuş kontrol cihazıyla iletişim kurmaz. Bazen okumalarına erişim sağlamak için doğrudan GPS'e veya diğer sensörlere bağlanabilirler. Bu türün iyi bir örneği Skylark OSD (+GPS ve akım sensörü) ve Süper Basit OSD'dir.
Denetleyiciye bağlı OSD'ler yalnızca uçuş denetleyicisinden gelen ve genellikle seri port (RX/TX) aracılığıyla gelen verilere dayanır. OSD'nin kendisi bu verileri görüntülemek dışında hiçbir şey yapmaz. Hobbyking'li MinimOSD, bu tür OSD'ye iyi bir örnektir (eğer sürüm, KV mod gibi değişiklik yapılmamışsa). Bu türün avantajı, OSD'nin kontrol cihazının sensörlerinden alınan verileri kullanmasıdır; bu, kontrol cihazının kendisinin bu verileri yönetimi ve kontrolü basitleştirmek için kullandığı anlamına gelir. Bağımsız OSD durumunda, OSD'ye bağlı sensörlerden gelen veriler uçuş kontrolörü tarafından kullanılamaz.
Hibrit tip OSD, bağımsız bir OSD olarak kullanılabilir (sınırlı işlevselliğe sahip) ve görüntülenen uçuş verilerinin aralığını artırmak için bir kontrol cihazına da bağlanabilir. KV modlu MinimOSD, bu tür OSD'nin harika bir örneğidir: bağımsız olarak kullanıldığında yalnızca RSSI'yi ve voltajı görebilirsiniz, ancak GPS'li bir denetleyiciye bağlandığınızda mevcut uçuş modunu, GPS koordinatlarını, yüksekliği görürsünüz. , vesaire.
En basit bağlantı bağımsız bir OSD'dir
Örnek olarak Hobbyking Süper Basit OSD'yi bir FPV kameraya, video vericisine ve 3S lityum pile bağlayın.

Teorik olarak Bat2 bağlantı noktasını kullanarak ikinci pilin voltajını izleyebilirsiniz.
Hibrit OSD'leri bağlama
Bu durumda OSD'nin akü voltajını ve RSSI seviyesini bağımsız olarak ölçtüğünü unutmayın (bunları denetleyiciye bağlamak ve seri bağlantı noktası üzerinden veri iletmek mümkün olsa da, her iki seçenek de harika çalışıyor).
Koordinatları, başlangıç noktasına olan yönü ve ona olan mesafeyi görüntülemeniz gerekiyorsa, GPS'i Naze32'ye bağlamanız gerekir.

Zaten kullandığım OSD
KV Takım Modlu MinimOSD
MinimOSD şu anda en sevdiğim OSD'dir ve onu kullanıyorum. Uygun yazılımın indirilmesiyle MinimOSD, Naze32, CC3D, Multiwii, APM ve PixHawk kartlarıyla kullanılabilir. Bu çok iyi tahta Sensörlerden elde edilen her türlü uçuş bilgisini kesinlikle görüntüleyebilen.

MinimOSD, sensörlerden elde edilen her türlü bilgiyi görüntüleyebilir
Hobbyking ve Banggood MinimOSD satıyor, ancak yanlarında RSSI, pil voltajı vb. için ek pinler bulunmayan orijinal versiyona sahipler. MinimOSD KV Mod'u satın alma fırsatı olsaydı onlarla uğraşmazdım.
MinimOSD Mikro

Yukarıda açıklananla tamamen aynı OSD, fark daha küçük boyuttadır. Ayrıca 12V -> 5V dönüştürücüsü yok ama bu önemli değil çünkü Zaten kart aşırı ısındığı için kimse bu dönüştürücüyü kullanmıyor.
BeyinFPV
Bu kart aynı zamanda uygun sensörlere sahipseniz her şeyi gösterir.




